Updated
2/17/20
Key Search Words: ROBOT, ROBOTICS, ROBOTIC VISION, ARTIFICIAL INTELLIGENCE, AI,
AUTONOMOUS ROBOT, MOBILE ROBOT, ROBOT NAVIGATION
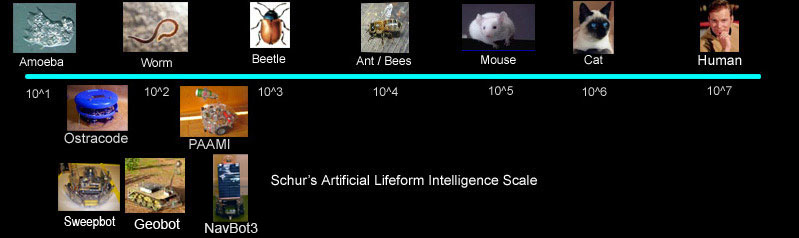 Above: Scale of increasing intelligence from left to right. We progress from the lowly brainless Amoeba upward
to the most sophisticated animal on the right. Along the bottom are some of our robots we have built at approximately
the level of intelligence that they have demonstrated.
Above: Scale of increasing intelligence from left to right. We progress from the lowly brainless Amoeba upward
to the most sophisticated animal on the right. Along the bottom are some of our robots we have built at approximately
the level of intelligence that they have demonstrated.
Quick Links
 Contact us
Contact us
|
| Here is our gallery
of home built Robotic projects we have built over the past years,
highlighting the technical challenges, architectural design,
and programming goals. Our robots are of the fully autonomous
type, reacting to their environment with their own sensors, and
with minimal outside control or human intervention. All of our
PIC based robots are hand made in our home workshop / electronics
lab. |

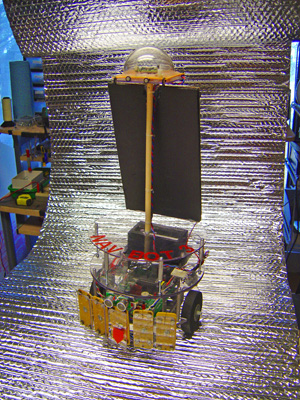
 Curent shot of project.
Curent shot of project.
Added since
the last write up - The mechanical gripper arm, to eventually
collect samples in the field. I designed and built the entire
arm in our home shop.
|
Outdoor Four Wheel Drive Robot
GEOBOT II
Started:
June, 2018
This outdoor roving
autonomous robot will be eventually demonstrated at the Payson
Park for all to see and question.
GO TO PROJECT PAGE
(Updated 2/17/20)
|
 Past Project Standard PIC Processor Based Robots:
Past Project Standard PIC Processor Based Robots:
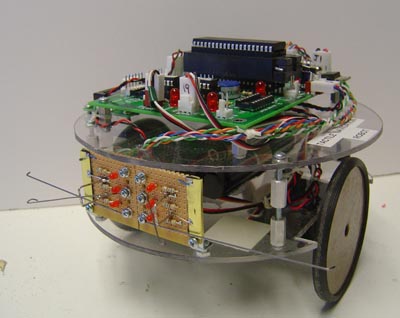
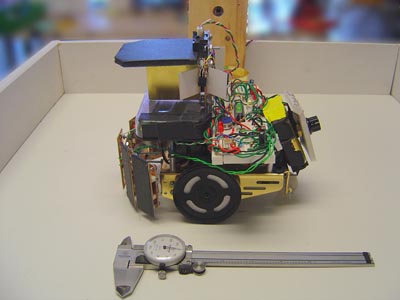
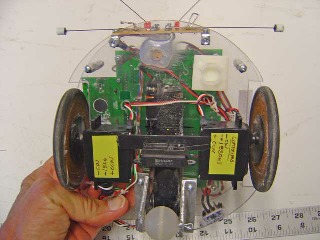 Underside of TDR with sharp sensor installed
in the middle on the bottom.
Underside of TDR with sharp sensor installed
in the middle on the bottom.
|
Sharp Distance Sensor Test Robot
Started:
March 2018
This robot carries
the Sharp GP2D12 optical ranging sensor underneath, after an
extensive linearization project (see here) to write a block of code
to allow its use in robots. This sensor can detect distances
from 9 to 80cm, with around an inch accuracy up to 12 inches
and two inches after that. Here, we evaluate the sensor on our
TDR test robot in the arena for future use in navigation in a
home enviorment.
GO TO PROJECT PAGE
(Updated 3/10/18)
|
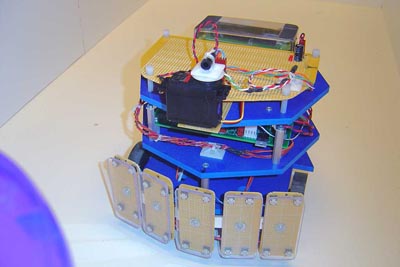
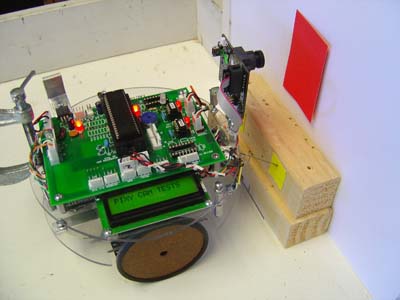 Pixy Vison Camera Test Robot precisely docked
with a mock up charging station.
Pixy Vison Camera Test Robot precisely docked
with a mock up charging station.
|
Pixy Vision Camera Test Robot
Started:
April, 2017
This robot is for
evaluating and charecterizing the Pixy Color sensor which uses
the PIXY CMU cam 5 from Carnegie Mellon University Robotics Lab.
GO TO PROJECT PAGE
(Updated 6/10/17)
|
ColorBot
1 - Sept 12, 2016
Color panel
detection Robot
|
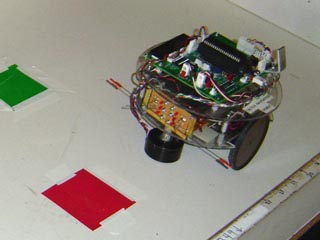
Color
Sensor Test Robot
Started:
8/16
This robot tests
a home made color sensor, which can detect three colors, black
and white panels on the surface which it drives.
GO TO PROJECT PAGE
(Updated
9/12/16)
|
 ADR - June 5, 2016
Audio / Sound detction
Robot
ADR - June 5, 2016
Audio / Sound detction
Robot
|
Audio
Decomposition Robot
Started:
4/3/16
This robot is to
be the testing hardware for the new Audio waveform envolope decomposition
evaluation.
GO TO PROJECT PAGE
(Updated
6/29/16)
|
April 17,
2016
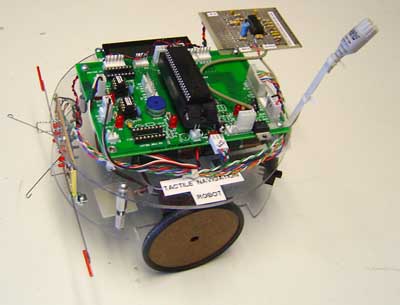
New image of T.D.R.
- the Tactile Design Robot
|
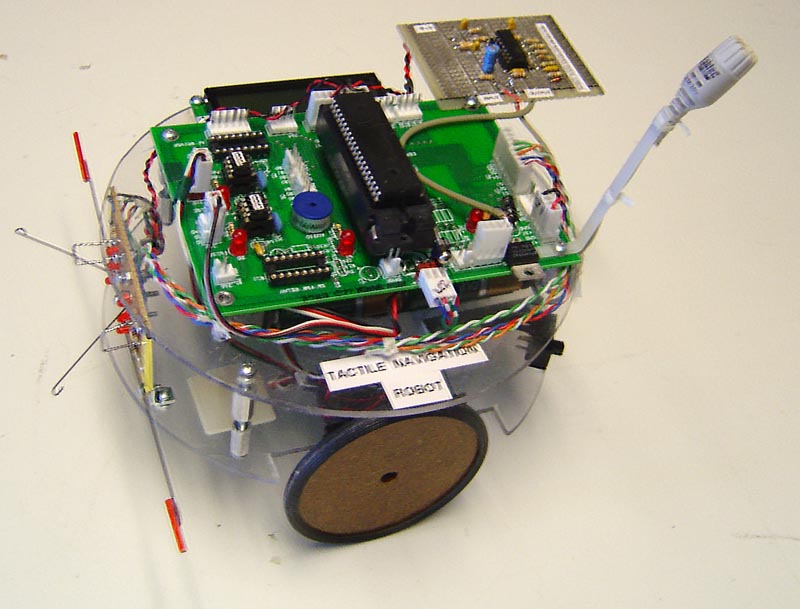
Tactile
Design Robot
Started:
2/29/16
This robot is to
evaluate in a home enviornment the use of insect like antenna
and mouse like whiskers for internal house navigaion.
GO TO PROJECT PAGE
(Updated
4/17/16)
|
 Dec 26, 2015
Dec 26, 2015
New image of the
fully upgraded Cbot-1A configuration. The largest difference
visible is the amount of new electronics under the clear watershield
dome.
|
C-Bot1A
(Plant Watering Robot Rebuild)
Started:
11/9/15
The previous version
of this robot only had enough capability and program memory to
water just one planter and that was it. This version, which has
had all the electronics completely replaced with new current
technology and a number of sensor boards to take the programming
load off of the main processor. Dozens of planters or more can
be serviced with this unit.
GO TO PROJECT PAGE
(Updated
2/29/16)
|
 |
C-Bot1
(Plant Watering / Maintainence Robot)
Started:
5/22/15
The first project
using CCS-C compiler will be the research and design of an autonomous
plant watering and maintainence robot. The first proto type will
be a small bot to demonstrate and develop the firmware and routines,
and this will lead eventually to a much larger and more sophisticated
device. First comes the experiments - learning to deal with plant
watering and monitoring techniques. Then on to building the actual
robot, now a physical reality as seen on the left panel.
GO TO PROJECT PAGE
FINAL REPORT
|
 This is NavBot 4
"Arm/Gripper Logic"
This is NavBot 4
"Arm/Gripper Logic"
|
Navigation Robot NavBot 4
Arm / Manipulator Logic Robot
The next phase
in the Logic Series of robotics articles is to explore some of
the basic concepts of incorporating a remote manipulator and
grasper into your mobile autonomous robot for accomplishing useful
tasks. And while an armless robot can do a limited amount of
jobs around the home, once you add an arm or at least a fixed
manipulator to the robot its capabilities are multiplied expotentially!
Project Started June, 2014
Project finished December 2014
GO TO PROJECT PAGE
|
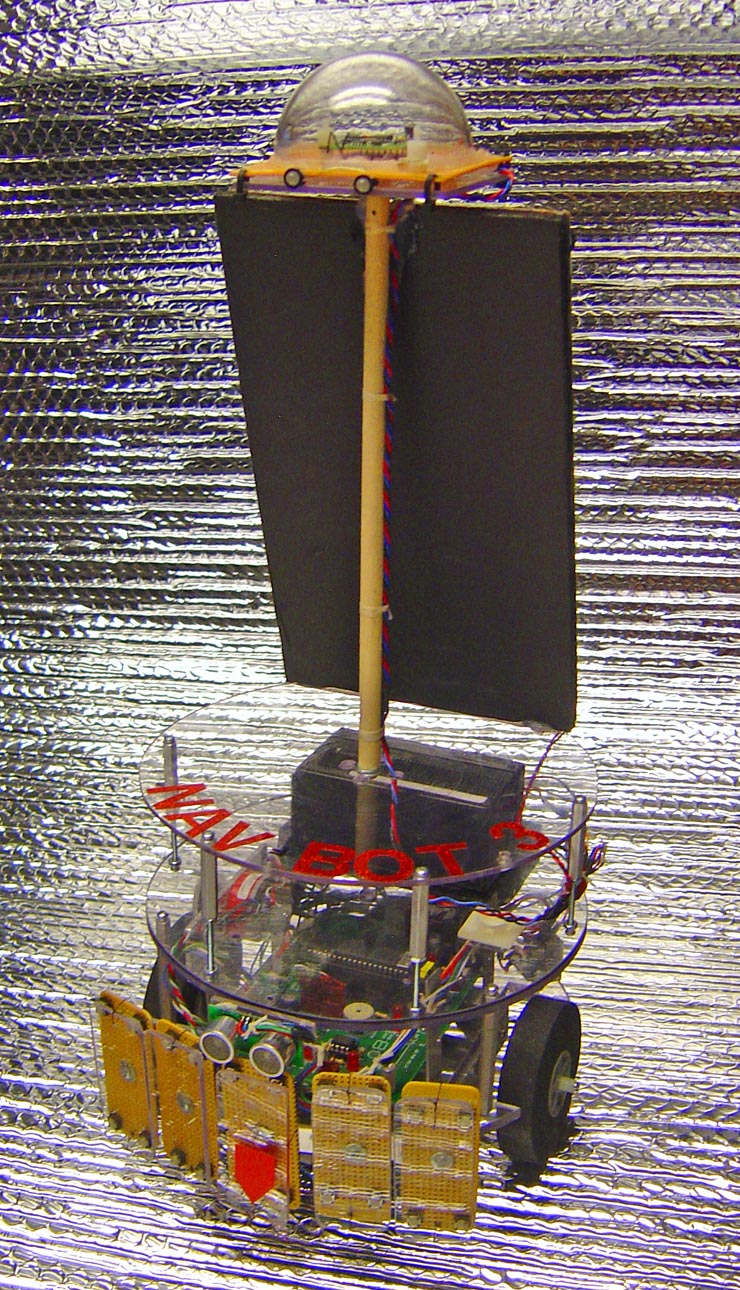
 This is NavBot 3
This is NavBot 3
|
Navigation Robot NavBot 3
Indoor Navigation and Homing
This is an extension
of the NR-1 and NR-2 projects, which were to primarily develop
the hardware. Here we are wiping the program clean, and developing
an autonomous robot which uses the tools we developed in the
NR-2 program. Additional hardware will be added as needed, with
an emphasis on indoor house hold navigation methods which can
be used for daily tasks.
Project Started January, 2013
FINAL REPORT 8/31/13
GO TO PROJECT PAGE
|
 NR-1 main page
NR-1 main page
|
Navigation Robot NR-1, 2
Household indoor navigation of autonomous robots
This project will
study the various aspects of indoor robot navigation. A small
8 inch sized robot will be used to test encoders, optical navigation
and localization and dead reckoning. Advancing the Vision Logic
series, this new bot will extend that research and include insect
like higher resolution imaging for later navigation experiments.
Project Started July, 2010
GO TO PROJECT PAGE
|
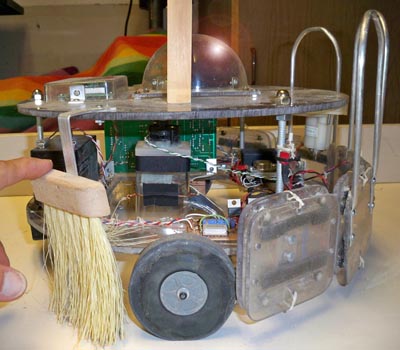 Sweepbot Main Page
Sweepbot Main Page
|
Floor Cleaning Robot Sweepbot 1A
Household indoor autonomous robot
Project Started May, 2011
This is an update
to the allready very sucessful robot. The sweep module has worn
out from use several times, and has now been replaced with a
brand new suction type vacuum module. Now it actually SOUNDS
like a real vacuum cleaner when it runs! Check out this new change:
GO TO PROJECT PAGE
|
 VLR main page
VLR main page
|
Vision Logic Robot Series
An Open-File Vision Study Autonomous Robot
Here
we present a series of in depth articles on using only vision
to navigate a robot in a household enviornment. The study will
evolve the number of eyes upward from one to compound eyes and
beyond in a step by step fashion.
Project Started January , 2009
Finished July, 2010
GO TO PROJECT PAGE
|
|
|
 Sweepbot main page
Sweepbot main page
|
Sweep Bot 1
A Floor Sweeping Autonomous Robot
This
robot was designed to fill a practical household need: To keep
the bathroom floor swept clean of the cat litter that escapes
from the cats litter box. It will live and work entirely within
the bathroom, and using the experience gained in the entire PICbot
Logic series, we will build on that knowledge to create a mostly
self sufficient worker drone.
Project Started August 24, 2007
Robot Finished December 14, 2008
The robot is still sweeping every day - Jan 2011....
GO TO PROJECT PAGE
|
 Picbot
V main Page
Picbot
V main Page
|
PICbot V
A Docking Logic Development Robot
This is part
four in our in depth series on developing more advanced A.I.
for a household robot. The PicBot V is used to develop several
beacon docking methods and setting the stage for autonomous charging
of the robots batteries.
Project Started Feb 1, 2007
Project Ended August 11, 2007
Docking Logic Final Report
|
 Picbot
IV main Page
Picbot
IV main Page
|
PICbot IV
A Stasis Logic Development Robot
This is the third
part of a larger program to greatly improve the Artificial Intelligence
(AI) of my successive robotics projects. The small PICbot IV
will be used to develop, analyze and detect navigation sensing
failures which may result in robot stasis.
Project Started December 1, 2006
Finished January 29, 2007
Final Report HERE
|
 Picbot
III main Page
Picbot
III main Page
|
PICbot III
A IR Prox Logic Development Robot
This is the second
part of a larger program to greatly improve the Artificial Intelligence
(AI) of my successive robotics projects. The small PICbot III
will be used to develop, analyze and perfect navigation principles
using modulated infrared proximity sensors.
Project Started November 1, 2006
Finished December 1, 2006
Final Report HERE
|
 PicBot II
PicBot II
|
Finished
October 2006
A Bumper Logic Development Robot
This
was the first part of a larger program to greatly improve the
Artificial Intelligence (AI) of my successive robotics projects.
The small PICbot series will be the vehicles to develop each
level of subsumtion separately to a level beyond what I have
done previously. The final goal of this program is to complete
the design for a Priority Arbitration Architecture PCB, which
can be adapted to all future robots. This should make it possible
to exceed the Beetle level of intelligence and push onward. The
first project was the bumper imact module. We were able to optimise
the reactions and behaviors on a generic sense on both a reflexive
and chronometric level. The result, is will be a huge article
on bumper logic.
And here is the
complete Article: Uploaded 10/12/06
|
 Geobot I
Geobot I
|
Finished
August 2006
Geobot
I was our first outdoor robot, and was designed to go out on
distance specific missions and collect rock and soil samples
and return them to base. We accomplished this, and the Final
Report can be read HERE. The main Geobot project
Pages start HERE
|
 VacBot 1
VacBot 1
|
Finished
October 2005
VacBot
I was a research project for developing a set of specifications
to a abetter understanding of how to construct an autonomous
home roving vacuuming robot. You can jump to the main page HERE and the Final Report
can be found HERE.
|
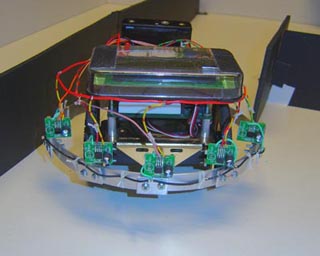
 P.A.A.M.I.
P.A.A.M.I.
|
Finished June 2005
PAAMI stands
for Priority Arbitration Machine Intelligence. She is
one of very few robots in existence that uses a totally hardware
approach to Priority Arbitration Architecture, with 8 levels
of Subsumption. Her primary function at this time is to self
charge, and not get stuck in a household environment not specially
prepared for a robot in any way - which includes stairwells and
sharp drop offs. she can collect items such as cans and tennis
balls and stack them at a known location with her gripper. PAAMI
makes very amusing sounds depending on which level of subsumption
is currently being arbitrated. Mostly beeps, chirps and ramping
tones.
|
 PicBot I
PicBot I
|
Finished April 2004
PicBot was our
first robot built with PIC processors, and mulit processor subsumption
architecture. It was a great deal more advanced in behavior than
the standard Boe Bot type with a BS2 processor.
|
 Ostracode
Ostracode
|
Finished March 2004
Ostracode is
a small single processor robot that has one mission: Don't get
stuck no matter what in an unmodified household environment.
He can also sleep at night when darkness falls, and makes sounds
like a cricket. It uses a BS2SX processor.
|
 Aurora Cam 1 Aurora Cam 1 |
Finished December 2003
Aurora Cam is
a robotic film camera system that works hard all night long taking
pictures of the night sky, patrolling for meteors, aurora and
sky phenomenon. It has been extremely successful.
|
|
| |
Mindstorms Based Robots:
 SkidBot
SkidBot
|
Finished
December 2005
SkidBot is the
bumper prototype for our big Geobot project, allowing us to rapidly
develop a mechanical model of our dual pushrod design. Skidbot
also was our first outdoor roaming bot made from Mindstorms technology,
in which the traction and ground clearance was paramount.
|
 ODObot 1
ODObot 1
|
Finished
August 2005
Odo 1 is my first
experiments in precise odometry demonstrated here by navigation
of a maze from start to finish by using odometry alone.
|
 Digital Aurora Cam Control
Digital Aurora Cam Control
|
Finished
July 2005
This robotic
device activates its program when the start button is pressed,
and operates the electronic cable release for my Canon 10D for
astrophotography.
|
 X-Bot
X-Bot
|
Finished
June 2005
Here is our first
Mindstorms robotic project in which we get the basic feel for
the technology of the kit, and the outrageous cult like worship
that these kits possess.
|
 RSR
RSR
|
Finished
June 2005
Here is a very
slow dual worm gear driven line follower, using tank treads as
well for a touch of interest. (RSR = Really Slow Robot)
|
Commercial Robots in our Collection Include:
|
HOME
You are visitor
number since June 17, 2001
3,342,987
Robotic Pterodactyl
Voice Controlled Verbot
Radio Controlled R2D2