|
This is the home page of our latest
robot, a machine based on a very recent concept in programming
and physical hardware using Priority Arbitration Architecture,
implemented in a strictly hardware fashion. What this means is
rather than a single large processor controlling her, PAAMI has
over a dozen microcontrollers running in parallel, simultaneously.
While an in depth description of her architectural concept can
be found here, the basics are simple, a layered
series of behaviors each programmed into one processor and running
independently of the other behaviors. All 8 layers of behaviors
are in order of priority, with the most important at the top
of the stack. The behaviors control of the robot is arbitrated
by the arbiter processor, which allows only the highest priority
processor that is requesting control over the robot to actually
have full control. So each processor can be programmed separately,
and finished before we move on to higher level of behaviors.
This makes the programming 10x easier, but the amount of hardware
is increased a bit.
On the electrical side,
PAAMI has two 12v gel cells - one for electronics and one for
the drive motors. Two 5x7 circuit boards are point to point wired
with ribbon cable interconnection. All Processors are PIC processors
running at 10MHz each, of several different types. She carries
her own constant current dual battery charger to simplify docking connection to two contacts. All
drive, LCD and other signals between processors are send along
9600kb serial busses. Access to the electronics is through the
hinged lid on top, which the beacon
sensor is mounted.
Programming is done in PICbasic from Micro Engineering Labs and
burned with the Microchip Picstart Plus burner.
Current behaviors
Pammi has 8 possible levels
of arbitrated subsumption. Currently not all slots are filled,
but as she grows we can add more levels and more processors.
Here is a list of the current levels, from highest priority to
lowest:
Decide: Controls day/night activity and oversees general movements using sonar to plan routes.
Impact: Bumper, and drop off evasive actions
(Seek) Finds cans or tennis balls
(Gripper) Controls gripper
IR Avoid: Proximity object avoidance before impacts occur
Charge Beacon: Locates and connects to charger, turns off power, sleep at night.
Sonar Cruise: What we do when nothing else is going on. Move forward within a fixed distance of objects then either veer a bit, or turn away.
Each of these behavioral
processors can control the drive motors, the LCD display, the
audio speaker, and status lights, and soon the arm/gripper. The
higher behaviors can subsume all the behaviors below them. A
trigger which can be an event such as bumper impact to beacon
detect can initiate the processor to subsume the rest below it.
The Future
The best is yet to come
with PAAMI. After we finish up with the drop off sensor array
and new back bumper, a sophisticated optical scanning array will
be installed on the front to detect soda cans and tennis balls.
A pivot down gripper will then arc over the top of the robot,
grab the soda can and PAAMI will stack them in a designated area.
That is our ultimate goal for her at this point. The skill learned
in constructing this robot will apply directly to our next robotic
project, an outdoor dual tank track locomotion robot, tentatively
called "GeoBot" that will autonomously collect rock
specimens and return them to base.
PAAMI Pictorial
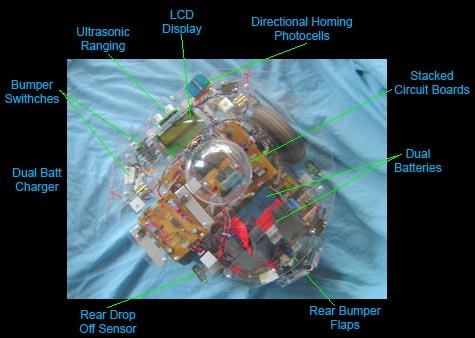 | Top View
- About 16 inches long, PAAMI is constructed from a clear polycarbonate
called "Hyzod", available in sheet form. Top and base
plates are 1/4" with the pylons between 1/2" polycarbonate
as well. The bumper is 1/16 inch material and everything
else is 1/8 inch Hyzod. From this top view you can see the batteries
in the rear, beacon sensor dome flanked by the battery charger
circuit, LCD display and primary board stack. |
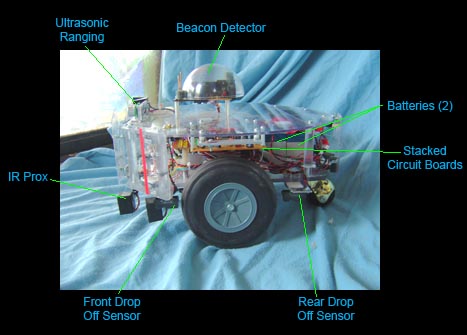 | Side View
- The large 5 inch wheels allow movement in the home environment
over numerous obstacles such as shoes, cat toys, and deep carpeting.
A rear ball shaped caster wheel rides freely and can reverse
its orientation to suit. Here you can see the drop off sensors which keep her from going over stairwells. |
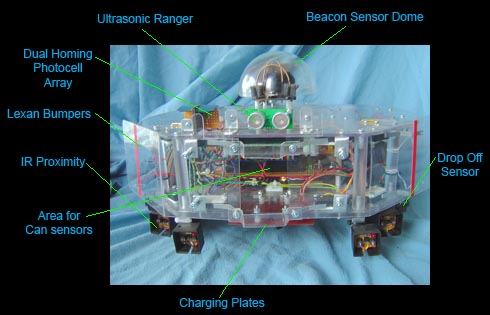 | Frontal View
- Plenty of sensor action here. The entire front of the bot is
one huge bumper plate, bent as it surrounds the angled sides.
The four black boxes on the front are IS417 proximity sensors
which has a range of about 6 inches in normal lighting. Each
has two powerful IR LEDs and seem to work fine even in bright
sunlight. Dominating this scene is the beacon sensor, under the
clear bubble on top. More on this in the next panel. Just under
that is the Devontech sonar sensor for obstacle avoidance in
the cruise mode, and perhaps later for scanning for soda cans.
The dual homing photocell array works in a very unique way. It
is constructed to use fuzzy logic to determine the most likely
location of a white light source. That would be windows and a
large Arcadia door. Thats where the charger is and allows the
robot one more piece of information to find the charger. |
 | Left - The
beacon Sensor. A substantial write up on its construction can
be found here. What Id like to add to that it works pretty well
through the clear dome, and protects it from impact damage. The
golden arcs in front are a new bumper design I've been experimenting
with, using the E string on a guitar. The shorter arc is in front
of the rear arc, about 1/4 inch. When an object such as the coffee
table shelf or cat scratching post will hit the dome, which is
above and not protected by the bumpers, the front string bends
like a spring and touches the rear one thus creating the electrical
contact for an evasive response to follow from the Impact Processor.
Amazingly, the beacon sensor works fine with this in front of
it. |
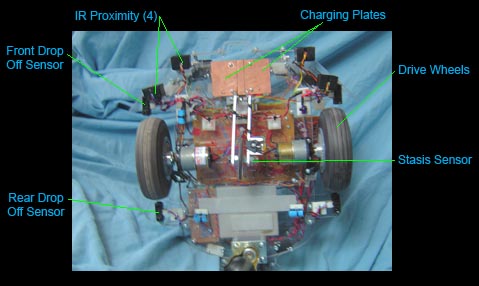 | Bottom view
- Lots of action going on here too. Besides the wheels and motors
which move the bot at a maximum rate of 1/3 foot per second,
the stasis sensor wheel (detailed here) rolls along
the middle as well. The large copper plates on the front are
for connection with the charger shown better here. And all four
drop off sensors can be seen on each side of the wheels. A fifth
one is not shown here, behind the caster wheel. A write up on
the charger and plates can be found here. |
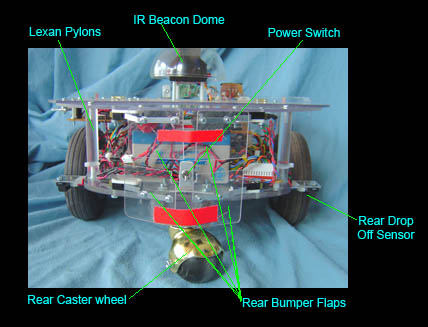 | Rear View
- The back bumper consists of two plates of thin lexan with the
main power switch in between. I am redesigning the rear bumper
assembly at this time to include a rear drop off sensor to keep
the bot from rolling off backwards down the stair way. |
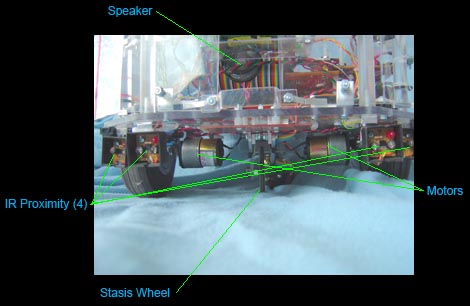 | Front Underside
- Careful examination of this image shows the thin stasis wheel
in the middle between the motors. It has a rubber O ring around
its edge to ride smoothly without slipping on nearly any surface.
Paamis speaker is a 16 ohm flat polyester type which can be driven
directly by the processors arbitrator mux. Right in front of
it you can see a gap in the bumper coverage. This clear spot
goes about three inches in. Here will be the optical array for
the soda can and tennis ball sensors. Later, the gripper assembly
will be mounted on top, with a gripper that comes down from above
and grabs the item. |
|


