 Updated 1/29/05
Updated 1/29/05
|
Implementing the Drop Off Sensor in PAAMI
- 1
--- First
Tests ---
|

Observers to the testing confirmed proper Operation.
|

|
Introduction
In both the home and office environment,
stairways present a fatal obstacle to the oblivious robot. When
an over hang is encountered that exceeds a preset parameter,
the robot must stop in time, and take evasive action to avoid
harm. For most robots, which have two drive wheels and a third
caster wheel on the rear, at least five sensors are used to detect
drop offs. We are currently developing the sensor array and programming
for PAAMI to function in a standard household environment, that
includes an often encountered stairwell in its normal travel.
This article will illustrate our solution to the problem, and
prove the concept with movies of exhaustive testing. Four Sensors
are installed at this point, and the rear caster sensor and possibly
an additional frontal sensor is on order. In PAAMI's Subsumption
architecture, the priority is 7, nearly at the top which is the
same as the impact bumpers. Therefore a drop off is considered
as serious as a collision. As a final test, the ultimate - the
robot will be aimed directly at the stairs and well all watch
and see what happens next...
|
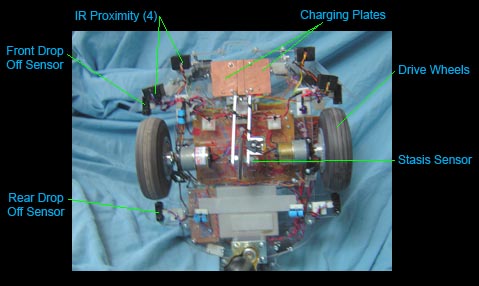 | Left: Underside
of Robot showing the location of the four drop off sensors, located
one inch behind and in front of the wheels, and flush with the
outside edge of the wheels. The rear castor sensor one is not
installed yet. |
| Right:
Positions 1 (rear) and 2 (front) mark the locations for the sensors.
While the frontal sensor could be mounted on the base plate,
the rear one is on a flat tab to make it flush with the outside
of the wheel. |
 |
 | Left: Close
up of the underside of the GP2D120 sensors from Sharp mounted
on a tab. The wires are securely tied down as to not catch on
anything, and a 1000uf capacitor MUST be installed across the
power into the device (5vdc) to keep huge current spikes from
resetting the microprocessors. The devices put out a non linear
analog voltage from 0 to 3v corresponding to the distance, up
to 30 inches or more. At PAAMI's height, the output is 1.8v and
drops to 1v when a 2 inch drop is seen. The outputs of the Sharp
sensors is connected to two PIC 12F675 micro controllers analog
inputs, and is digitized to 10 bits. When the digitized threshold
is exceeded, a signal is sent to the IMPACT microprocessor which
also controls bumper, and stasis sensing and appropriate evasive
action is taken. Being Level 7 in the Priority Arbitration Architecture,
it overrides everything and will stop the bot right in its tracks
if it tries to drive over an edge. |
| Right:
Side view showing location of Sharp GP2D120 drop off sensors.
It is crucial that they see the path the wheel is about to take.
What is missing here, is the one that will mount on and pivot
with the rear caster wheel. | 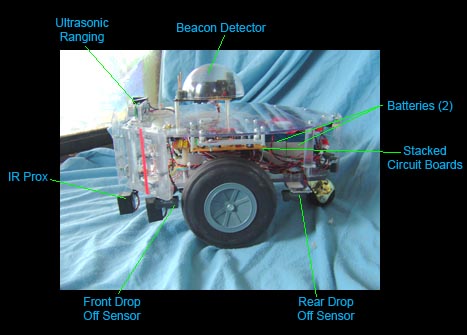 |
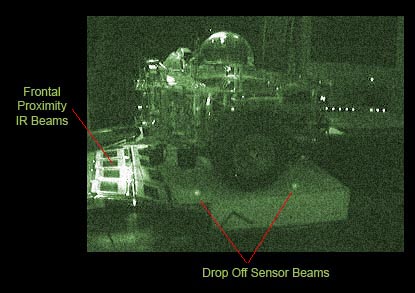 | Infrared
Night Vision scope view of PAAMI in nearly total darkness, showing
the spots projected onto the ground by the Sharp IR transmitters
in the drop off sensors. The bright spray of light coming from
the front of the bot is from the frontal IS417 IR proximity sensor
array. |
 |
Left, a still from
a short and tiny movie (420K) showing a crucial test, driving
on a table top elevated four inches off the floor. The robot
did not drive off and avoided the edges fine, until its back
wheel which has no sensor yet went over the edge while backing
up and hung it up.
Click the image to the
left to see the MPG movie with SOUND.
|
 |
Left: Stairwell test
1 - Small movie. (400k) The robot is shown approaching and performing
the escape maneuver on the edge. I think Id like to see a frontal
sensor as well, it's pretty harrowing to see it hang over that
much.
Click the image to the
left to see the MPG movie with SOUND.
|
HOME
You are visitor
number since June 17, 2001

FastCounter
by bCentral