|
Robotics
First
Can Gripper Arm
Testing
4/23/05
|
 P.A.A.M.I.
P.A.A.M.I.
|

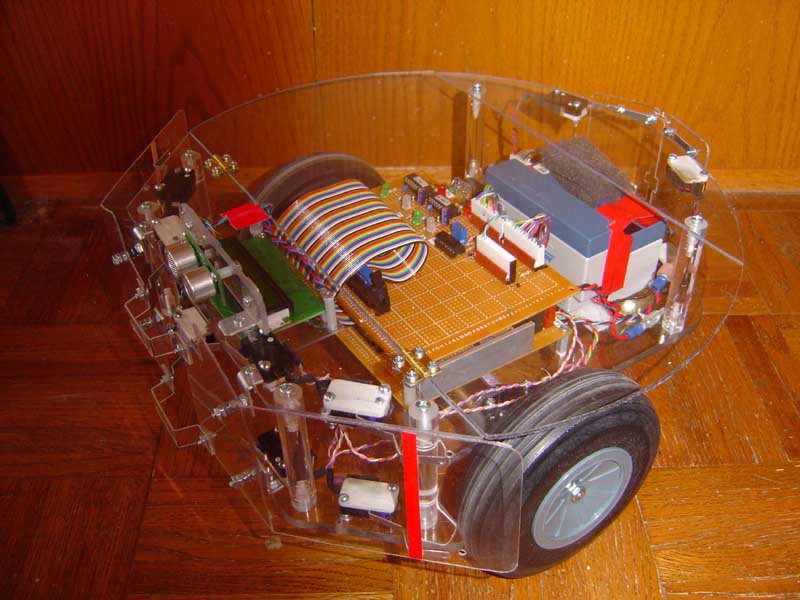
| Here are a few shot and
two movie clips of our first testing of the new can gripper.
Since there was simply no room on the front of the robot for
an arm because of the high density of sensors, and the front
top cant be blocked either because of the beacon sensor and sonar
array. We decided to make the arm a U shaped lexan bar, with
the gripper in the middle. This allows us to stow the gripper
on the robots back when not in use. A more detailed description
and more photos of the mechanics will follow in another write
up, but for now, here is the current setup. PAAMI is programed
with 14 parallel processors, the highest level of arbitration
is the new "Grab" processor. It subsumes every other
level and for this test, it subsumed the other systems while
it grabbed the can, then no longer subsumes when done, and the
robot drives off using the lower levels of arbitrated architecture
to control the robot. The robot will find the can later by a
new sensor array I'm working on now with Sharp distance detectors. |
Images are full size and are not clickable.
 | Here the gripper is seen
in its stowed position, all the way back on the U shaped arm,
and the gripper wide open. |
 | The gripper is partially
open in the grab mode, and the arm starts to pivot over the top
of all the top sensory arrays. |
 | With the arm down to the
grab position, the gripper is ready to close on the can. |
| | When the gripper closes,
and lever switch closes on the cans surface and tells the robot
it really has grabbed the can. IF there is no can, it grabs again
and if there is STILL no can, the gripper is stowed and the bot
moves on. |
 | Here we see the can being
lifted onto the back of the robot. |
 | Now stowed on the back
of the bot, the robot will now travel to the nearby charger and
dump the can in a bin on top of the charger. (Eventually anyway!) |
 | Frontal view of robot running
off with can on its back. |
Movie 1 (800k mpg with SOUND)
| This
first small clip shows the arm grabbing a can, lifting it and
stowing it. It then drives off. |
Movie 2 (1meg mpg with SOUND)
| This
second movie shows what happens if the can is not there. It grabs
for it twice, looking for a contact switch closure on the gripper.
Deciding there is no can, it stows the gripper and drives off. |
Robotics Main Page
HOME
You are visitor
number since June 17, 2001

FastCounter
by bCentral